
我們常將一個人走路速度極快稱為「健步如飛」,但「走路」跟「跑步」的差別在哪?對於物理學家來說,這看似複雜的運動機制可以被簡化為簡單的「物理模型」。我們就以「有足動物」為例,來探討「走路」及「跑步」的物理機制。

行走的藝術
1970 年代,義大利人體生理學家喬瓦尼.卡瓦尼亞 (Giovanni Cavagna) 觀察到一個有趣的現象:當我們行走時,位於前方的腳踩在地面上會成為支點,這隻腳就是我們的支撐腳,而移動的過程中,身體重心會在腳的上方畫出一道弧線,當重心超過支點時,我們就會換腳(變換支點),再進行另一次重心的位移。他就根據這個現象提出了「倒單擺模型」:我們行走的狀態就像倒過來的單擺,擺錘就是身體的重心,而擺桿就是我們的支撐腳,行走的過程就是不斷的換支點及讓重心擺動。在擺動的過程中,我們身體巧妙地進行了能量交換,當身體重心隨著步伐上升到最高點時,前進的動能 (kinetic energy) 被轉化為重力位能 (potential energy) 儲存起來,而當身體隨後往下墜時,位能又順勢變回動能,推動身體邁向下一步。隨著步伐的移動,位能與動能就像鐘擺一樣來回交換。肌肉在過程中擔任的角色,並非持續發力,而是在關鍵時刻給予微小的「推力」,就像我們輕推鞦韆一樣。這種模式是自然界為了最省力的「低速巡航」模式所演化的成果,這也是人類能夠負荷長途跋涉的原因。
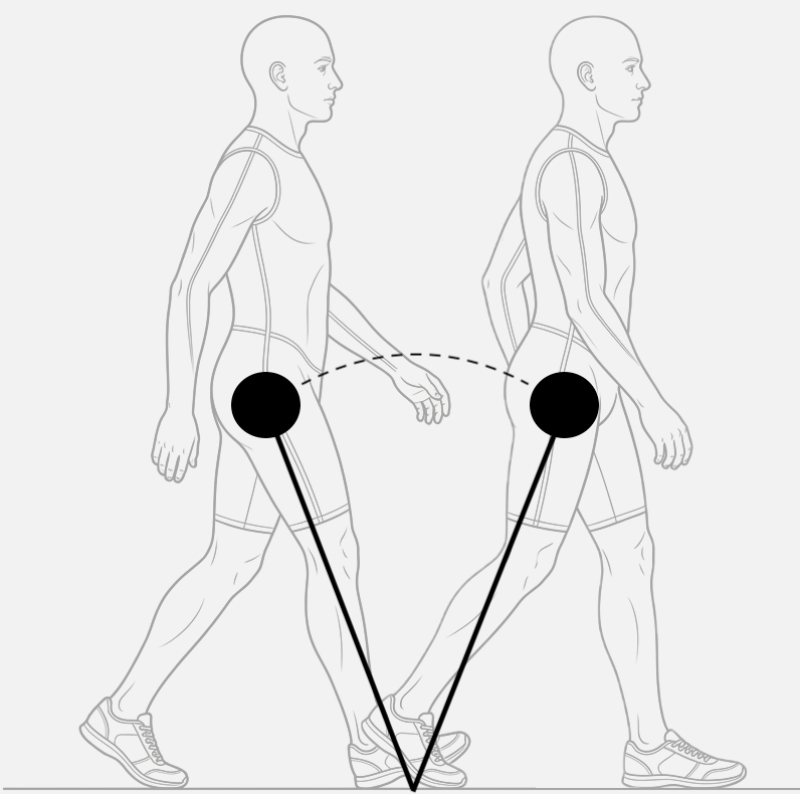
這種單擺運動的精妙,在於步履切換間的「動量接力」。為抵銷前腳著地產生的碰撞損失,後腳會在離地前精準執行「推離」,補償位移中的能量空缺。此外,每雙腿都有專屬的「自然頻率」;當步頻與重力達成共振,肌肉便能以最低耗能,讓移動昇華為一場順應物理規律的優雅藝術。
速度的臨界點
相信大家都有這種經驗,就是當我們下坡的時候,剛開始是用走的,但當我們愈走愈快,在某個時刻就會突然變成小跑步。這種現象在四足動物身上也可以觀察到。但為什麼我們和四足動物在加速時,不能無限地增加「走」的速度,而會在某個時刻切換成「小跑」(Trot) 或「奔馳 」(Gallop)?這跟能量消耗有關,我們可以使用「福祿數」(Froude number) 來判斷。
福祿數是一個無因次的物理量,用來衡量「慣性力」與「重力」比例,公式為
Fr = v / (gL)1/2,其中 v 是移動速度,g 是重力加速度,L 是動物的腿長或特徵長度。在「倒單擺」的行走模式中,動物經由重力將上升的重心向下拉以完成下一次擺盪。當速度增加到一定程度,超過重力能提供圓弧運動所需的向心力極限,物體就會飛離地面。實驗顯示,大多數四足動物都會在福祿數接近 0.5 時切換成「跑」的狀態。這種切換不單是為了避免「飛離地面」的不穩定感,更是為了尋找身體構造的「最低能耗」。
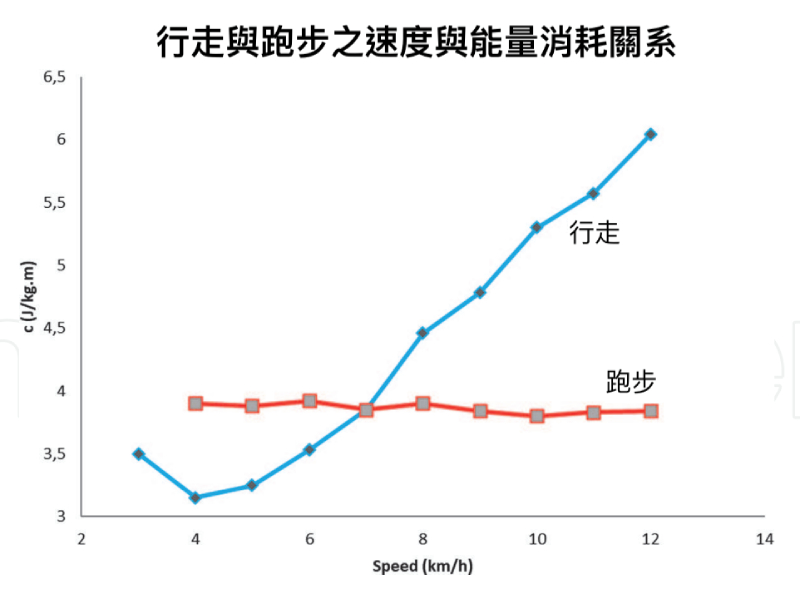
行走與跑步的能量消耗趨勢不太一樣,行走所消耗的能量是隨著速度增加,而跑步不管速度為何,都是維持差不多的能量消耗。一般情況下,身體會以消耗最小能量的方式移動,所以在移動速度較慢時,我們是使用「行步」,而移動速度較快時,就會是「跑步」模式,步態的切換點就是這兩種能量消耗趨勢線交叉處,速度大約為每小時 7 – 8 公里。換句話說,從這個能量消耗趨勢也能看得出來,為什麼近年來會有專家推薦「超慢跑」及「快走」運動的原因。因為超慢跑就是在移動速度較小時,使用跑步的姿態前進;而快走是在移動速度較快時,仍維持步行姿態。簡單的說,就是強迫身體使用較耗能的方式運動,以達到燃燒熱量的目的。
奔跑的靈魂
我們知道了在特定速度下,步態會從行走切換成跑步,那下一個問題是「行走」與「跑步」的差別是什麼?或是說,「行走」與「跑步」的步態差異在哪?最直接可以分辨行走與跑步的物理特徵就是「騰空期」。當我們處於行走步態時,會隨時都保持著「至少」一隻腳接觸地面,而在支撐腳轉換的過程,是雙腳同時著地;但處於跑步步態時,是「最多」只會有一隻腳觸地面,且必定包含著一個騰空期,也就是雙腳都會完全離開地面的時間點。因此跑步的物理模型就不是倒單擺,而是另一種稱為「彈簧質點」的模型。
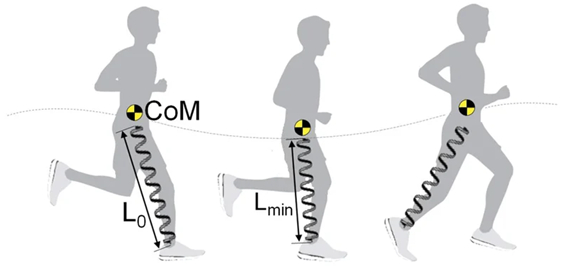
彈簧質點模型是說,當我們進入跑動或跳躍狀態時,其腿部不再充當剛性的硬桿,而是化身為一根充滿彈性的彈簧。形成這個彈簧狀態的主角是隱藏在筋骨間的「肌腱」(如阿基里斯腱)。根據研究,當動物奔跑落地時,巨大的地面反作用力會壓縮身體裡的「生物彈簧」,將原本會消散的動能暫時轉化為彈性能 (elastic strain energy) 儲存起來。然後在起跳的一瞬間,這些儲存的能量會一次釋出,我們的腿就像鬆開的彈簧,將身體彈射到空中。
在彈簧質點模型中,重心的移動是另一個重點。跑步時,支撐腳相對應彈簧為拉伸狀態,身體重心在較高的位置;當重心移到支撐腳上方時,膝蓋彎曲且腿部肌肉壓縮,相對應的彈簧為壓縮儲能狀態,造成重心變低;但重心轉移到支援腳前方時,彈簧能量釋放將身體前推,重心又回復到高點。這也是行走跟跑步的模型差異點,行走時,重心在支撐期中間是最高點;而跑步時,重心在支撐期中間反而是最低點。
生物槓桿與步態的交響樂
倒單擺模型及彈簧質點模型除了應用在人類身上,也適用於四足動物。因為無論是人類或是四足動物,重心的控制就是影響移動的核心關鍵,所以在生物演化上,存在著許多能增加重心控制的演化痕跡。例如:為了讓長腿能快速擺動,而根據物理公式,旋轉半徑對慣性的影響是平方倍,動物必須降低肢體末端的轉動慣量,因此,優秀的跑者都是將沉重的肌肉集中在肢體近端(如大腿),而末端則演化為輕巧的肌腱與細長的骨骼,這樣才能以較低的能量成本,完成高頻率的跨步動作。
除了肌肉外,演化也在動物的骨骼結構中留下了智慧的印記。當我們觀察犬或馬時,會發現牠們的「腳掌」比例與人類大相徑庭。這些奔跑好手在演化過程中,將原本與地面接觸的蹠骨向上抬升,轉化為腿部的一段支點。這種轉變產生了 3 種截然不同的腳掌構造:如人類般的「平地行走 」(plantigrade)、貓狗類的「趾行」(digitigrade),以及馬羊類的「蹄行」(unguligrade)。從生物力學來看,趾行與蹄行有效地延長了肢體的「力臂」,雖然會需要更強力的肌肉,但卻能換取末端極大的位移步幅。
當動物進入時速超過 60 公里的極速奔馳時,力學舞臺多了「脊椎」一角。以獵豹為例,牠們的脊椎具有驚人的柔韌性,在奔跑循環中,脊椎會經歷劇烈的伸展與彎曲,這讓背部肌肉與強韌的韌帶化作一張「大弓」。當身體蜷縮時,脊椎儲存位能;當身體舒展時,這股能量與腿部的彈力疊加,將獵豹的「騰空期」推向更極致的地步。這時,牠們已經不只是在跑,而是在進行一場連續的彈射與爆發。
結語:演化的力學智慧
從力學的角度回望,有足動物的運動機制演化特徵,都扣合著物理定律的齒輪。這並非巧合,而是自然界在長達數百萬年的時間裡,對「移動效率」進行的嚴苛優選。不論是利用「倒單擺模型」在林間優雅漫步,還是踩著「生物彈簧」在荒原上瘋狂奔騰,每一種生物都以其獨特的方式,進行重力與慣性交織的舞曲。


本著作由本館研究人員所提供,博學多文團隊編輯製作,以創用CC 姓名標示–非商業性– 禁止改作 4.0 國際 (CC BY-NC-ND 4.0) 授權條款釋出。若需要使用本篇的文字、圖像等,請洽本館出版室。